זהו פוסט ראשון בסדרה שתעסוק ביצירת חיישנים ומתגים המחוברים כולם לרשת פרטית שלכם.
בסדרת הפוסטים הזאת אראה כיצד להכין חיישנים אלחוטיים במחיר נמוך ולחבר אותם לעולם של ה"אינטרנט של הדברים" הפרטי שלכם.
הנתונים מהחיישנים יזרמו כולם ל"ענן" פרטי עם שליטה מוחלטת בו. בנוסף אראה כיצד להשתמש בכלים יעודיים כדי לנהל ולנתח את הנתונים מהחיישנים.
כמובן הכל בסגנון "עשה זאת בעצמך" ועל טהרת הקוד הפתוח, בנוסף נדע כיצד לאסוף את המידע מכל הדברים, לאחסן אותו ונראה מה ניתן לעשות עם המידע הזה וכיצד ניתן לבצע פעולות על סמך המידע.
בנוסף נראה כיצד "להחכים" את המערכת בכך שנחבר תסריטים כמענה לתרחישים שונים על מנת לבצע אוטומציה של פעולות שונות – "בית חכם"(לדוגמה יש מישהו בחדר וחיישן האור מזהה רמת אור נמוכה – אז המערכת תדע להדליק את האור!)
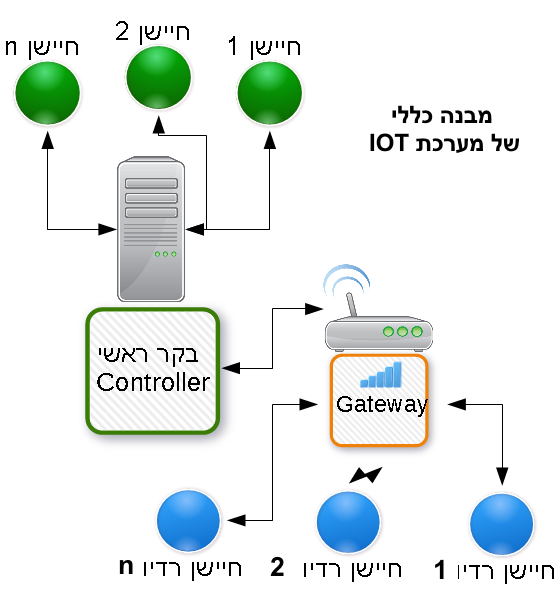
המבנה הכללי של מערכת :
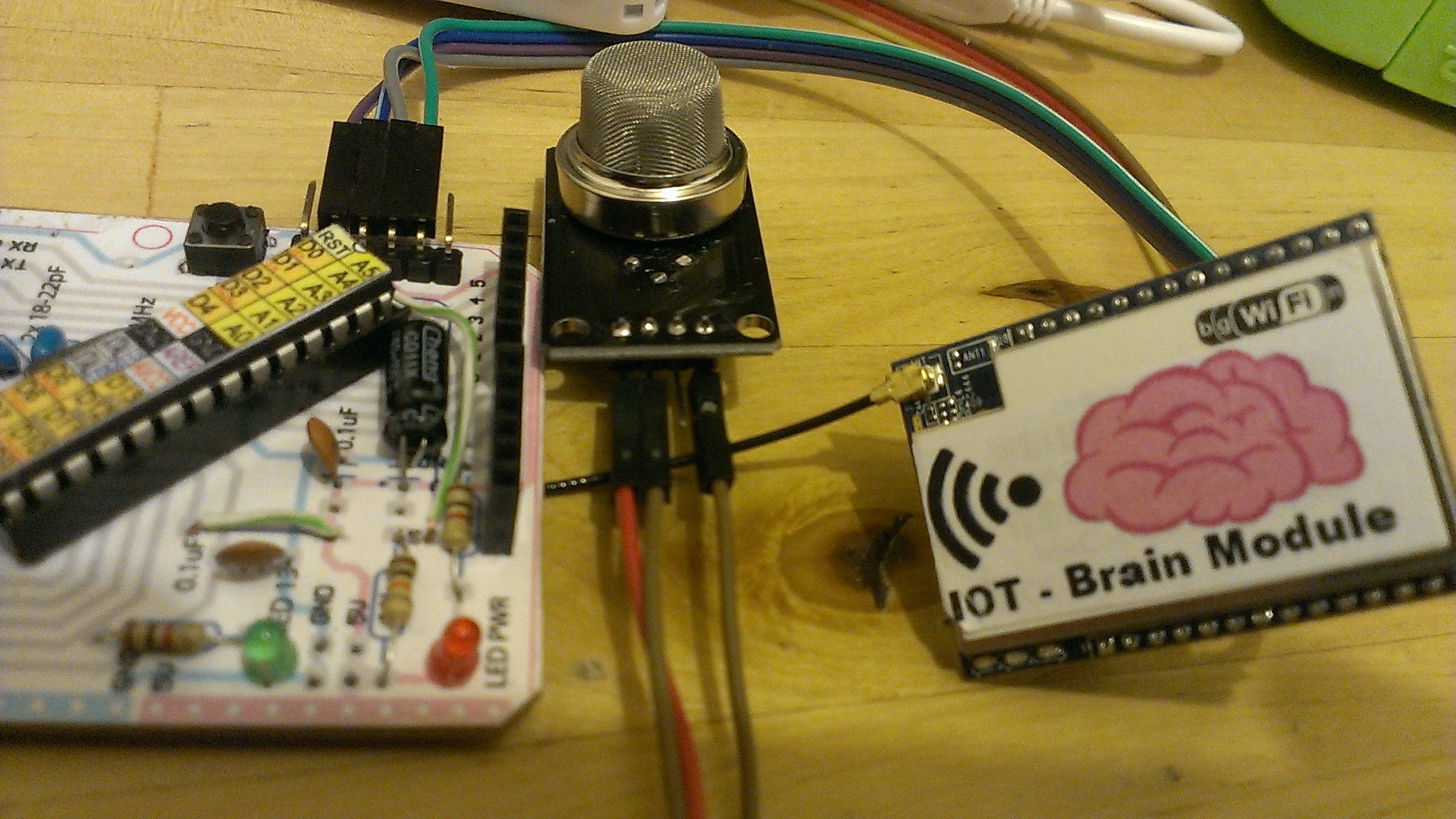
יחידת הקצה/החיישן : מיקרו בקר כלשהו – במקרה שלנו זה יהיה ארדואינו עם משדר רדיו או ESP8266 שמחובר ב- WIFI לרשת הביתית – אליו מחוברים חיישנים או מתגים שונים.
במקרים בהם יהיה שימוש בתקשורת רדיו (לא WIFI) המערכת תכלול גם gateway שיקשר בין הרשת של יחידות הקצה לרשת הביתית/אינטרנט.
בקר ראשי – Controller – מרכז את המידע מכל החיישנים וממנו מתבצעת השליטה והבקרה, שולח ומקבל פרמטרים לחיישנים ברשת, עוקב אחר הנתונים העדכניים ביותר שמדווחים על ידי חיישנים וגם בדרך כלל מספק ממשק משתמש לשליטה על כל הרשת ומריץ לוחות זמנים מוגדרים מראש או תסריטים.
כפרוייקט ראשון אראה כיצד יצרתי מערכת השקייה לגינה ביתית יחד עם מספר חיישנים המפוזרים בגינה שמעבירים לבקר הראשי את הנתונים שעל פיהם הוא מעריך האם להפעיל את מערכת ההשקייה.
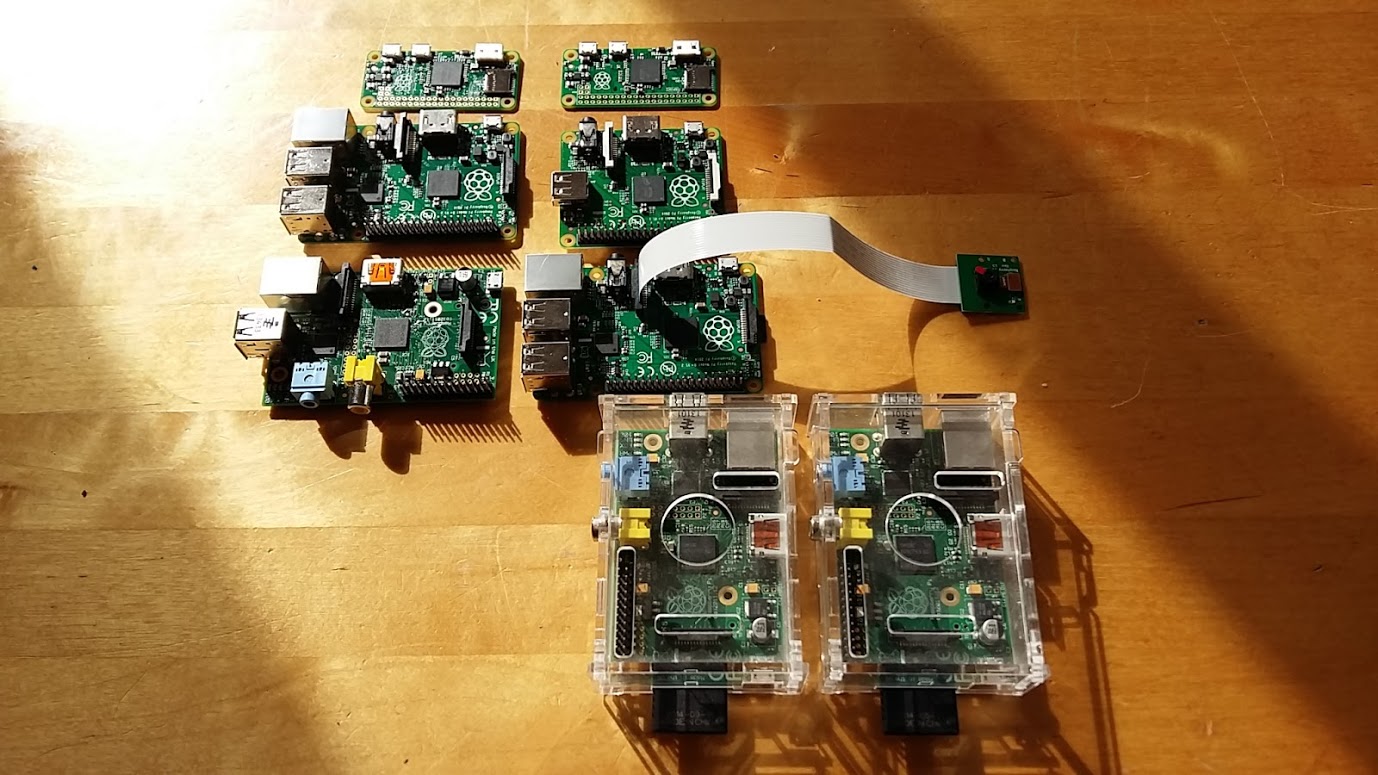
נתחיל עם הבקר הראשי (מספר 3 במבנה הכללי)- הוא ישמש אותנו בכל הפרוייקטים ואליו יתחברו כל החיישנים. ישנם מספר תוכנות בקר ראשי נפוצות שיושבות על על מספר אפשרויות חומרה, כאן נעשה שמוש ב Domoticz שזו מערכת ניהול בית חכם המאפשרת שליטה ובקרה על חיישנים ומתגים שונים. החומרה שמצאתי הכי מתאימה לדעתי להרצת Domoticz זה Raspberry Pi. יש מבחר של לוחות פיי:
ו-Domoticz יכול לרוץ בצורה חלקה אפילו על Raspberry pi B הגירסה הישנה עם 512MB זכרון RAM ,וזה הלוח שאני מריץ עליו(אחד משני הלוחות התחתונים בתמונה).
ספק כוח מיקרו USB שנותן 2A.(כל ספק מקורי של סמרטפון סביר).
התקנה:
מורידים אימג' מכאן(זה בעצם מערכת הפעלה שלמה של Raspbian הכוללת כבר את Domoticz)
לאחר ההורדה מחלצים את הקובץ , מפרמטים את כרטיס הSD עם FAT32 ומתקינים את האימג' בעזרת התוכנית – win32diskimager.
מחברים את הרספברי לראוטר עם כבל הרשת ולמטען ואחרי ההדלקה נחכה כ 2 דקות ונלך לממשק הניהול בראוטר הביתי ע"מ לראות באיזה כתובת IP הרספברי נמצא.
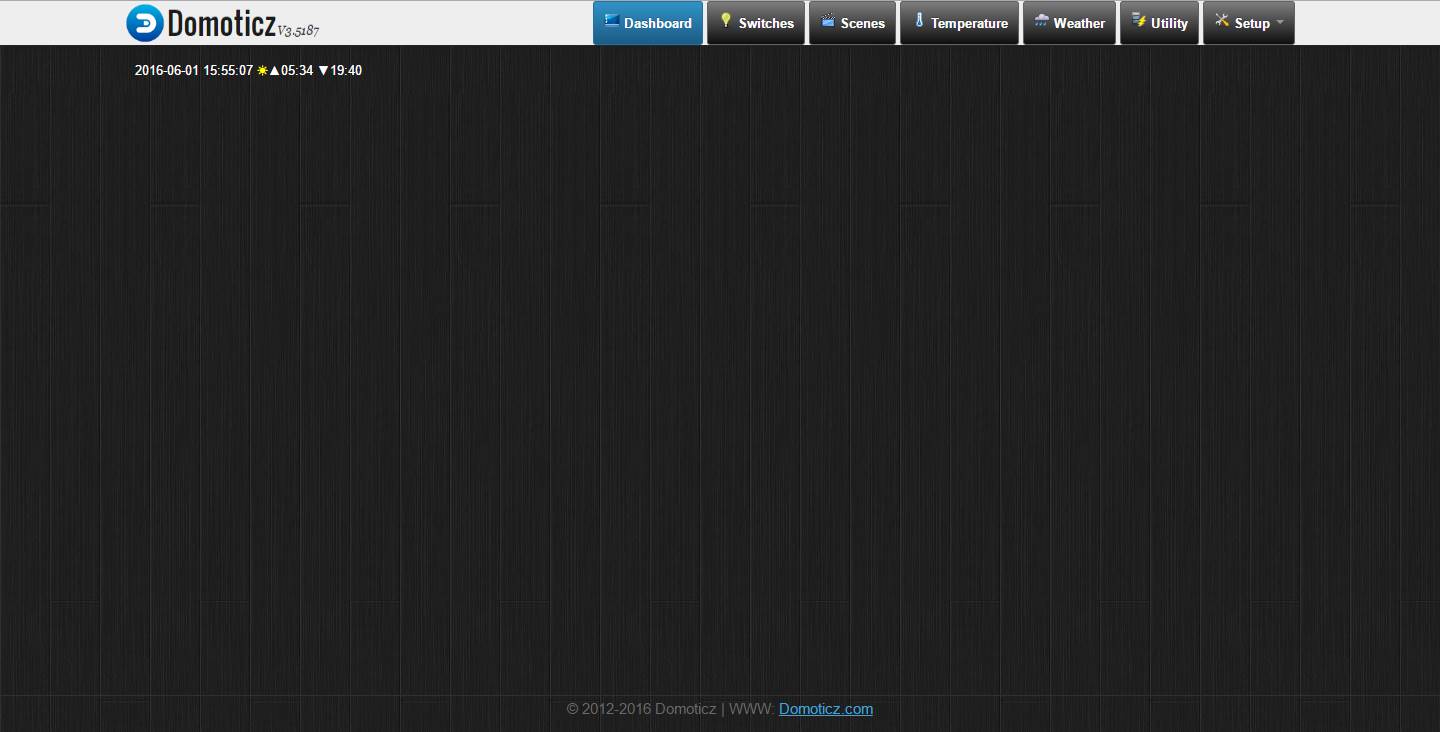
נתחבר ל http://raspberryIP:8080 ונקבל את ממשק הניהול:
זהו – יצרנו את הבקר הראשי.
יחידת קצה WIFI שנבנה תהיה ללא צורך בGATEWAY (במובן מסויים הראוטר הבייתי הוא בעצם GATEWAY).
לצורך פשטות נשתמש בלוח NODEMCU אותו ניתן לרכוש לדוגמה כאן.
שוב לצורך פשטות נוריד ל NODEMCU קושחה(firmware) בשם ESP EASY.
נחלץ את הקבצים ונפעיל את הסקריפט הבא:
flash.cmd
יש לבחור בפורט המתאים,בנפח האחסון במודול ובגירסת הקושחה.
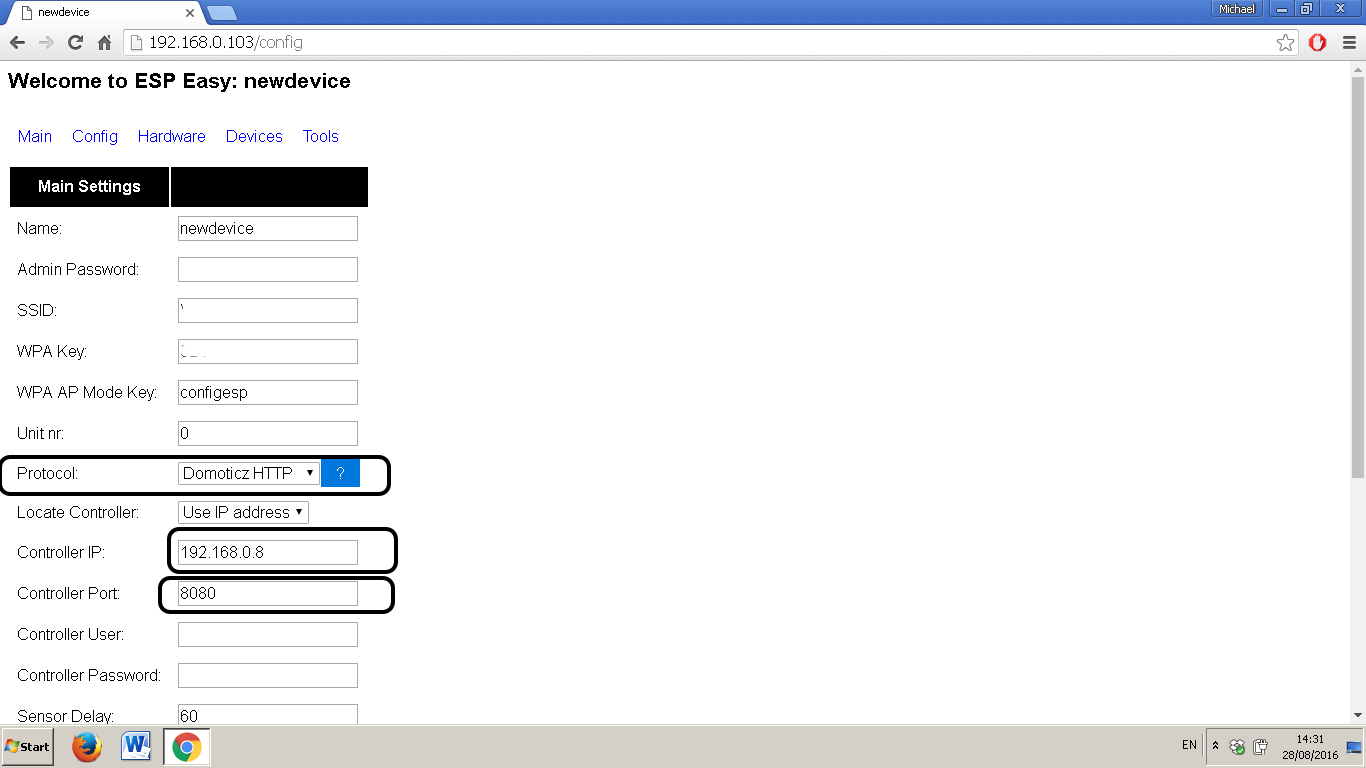
לאחר מכן יופיע ראוטר חדש ברשימת נקודות ה WIFI הזמינות : esp_0 יש להתחבר אליו ולפתוח דפדפן שאוטומטית יוביל אותנו לדף הגדרות שם נזין SSID וסיסמה של הראוטר הביתי.
מודול עקיבה בזמן אמת עבור חפצים/אנשים/בעלי חיים/מכוניות.
הפרויקט שמוצג כאן הוא לצורך "בדיקת היתכנות" של מודול עקיבה GPS באמצעות שרת WEB. כל מה שמוצג כאן הוא על אחריות המשתמש ואין לאתר או למחבר הפוסט שום אחריות למוצג כאן כולל לכל נזק שייגרם. המשך הקריאה על אחריותכם בלבד!
כמו כן במדריך זה אין כל התייחסות לנושא אבטחת מידע וסייבר. הוא לצורך "בדיקת היתכנות" בלבד (POC) קבצי השרת פגיעים וכל מי שירצה יהיה לו גישה אליהם.כמו כן התקשורת בין החבילה לשרת ובין הלקוח לשרת לא מוצפנת וזמינה לכל. בחלק הבא תהיה התייחסות גם לנושא זה.
1.היחידה אחריה נעקוב (להלן החבילה) תהיה מורכבת מ:
בקר (ארדואינו)
מודול GPS ע"מ לדעת מיקום (SIM808)
מודול GSM לצורך התקשרות עם שרת WEB ע"מ לדווח לו את המיקום.(SIM808)
2.היישום בענן/שרת אינטרנט יהיה מורכב מקובץ PHP שאליו החבילה תדווח על מיקומה ,המיקום ישמר ולקוח שירצה מידע על מיקום החבילה יקבל זאת בצורת JSON.
3.הלקוח זה דף HTML עם מפות של גוגל שמתעדכן כל כמה שניות ע"י JSON עם פרטי מיקום החבילה אותו הוא מבקש מהשרת/ענן.
בציור:
שלב 1 – החבילה מזהה מיקום באמצעות GPS.
שלב 2 – החבילה מדווחת מיקום לשרת.
שלב 3 – לקוח מבקש מידע על המיקום של החבילה מהשרת , מקבל אותו ומציג אותו ע"ג מפה.
בנוסף יש צורך בשרת שיכול להריץ PHP ושזמין מהאינטרנט (לא יכוסה במדריך זה).
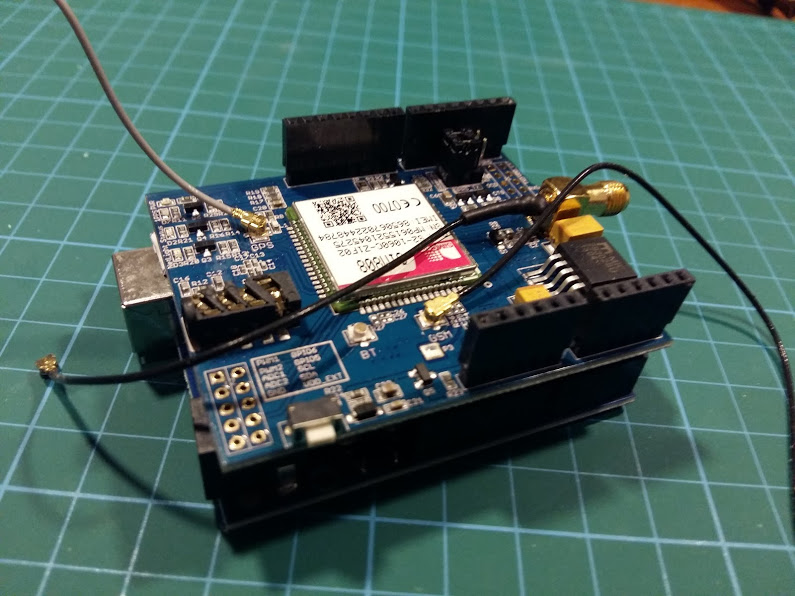
נחבר את המגן לארדואינו ונחבר את הארדואינו למחשב עם הכבל – בצורה כזאת גם ה SIM808 מקבל מתח.
הקוד:
/**
*
* GPS Adapted From Adafruit_FONA lib:
* Copyright: 2015 Adafruit
* Author: Todd Treece
* Licence: MIT
* Adapted by https://iot.org.il
**/
#include "Adafruit_FONA.h" //lib for the sim808 shield
#include <string.h>
#include <SoftwareSerial.h> //for communicating with sim808
#define FONA_RX 8
#define FONA_TX 7
#define FONA_RST 4
SoftwareSerial fonaSS = SoftwareSerial(FONA_TX, FONA_RX);
SoftwareSerial *fonaSerial = &fonaSS;
Adafruit_FONA fona = Adafruit_FONA(FONA_RST);
int Powerkey = 9;//pin for powering the SIM808
boolean gprson = false;
boolean gpson = false;
void power(void)
{
//digitalWrite(Powerkey, LOW);
//delay(1000); // wait for 1 second
digitalWrite(Powerkey, HIGH);
}
void flushSerial() {
while (Serial.available())
Serial.read();
}
void setup() {
pinMode(Powerkey, OUTPUT); // initialize the digital pin as an output.
power(); //power on the sim808 or power down the sim808
while (! Serial);
Serial.begin(115200);
Serial.println(F("Initializing sim808... (May take a few seconds)"));
fonaSerial->begin(4800);
if (! fona.begin(*fonaSerial)) {
Serial.println(F("Couldn't find sim808"));
while(1);
}
Serial.println(F("sim808 is OK"));
while(!gpson){
delay(1000);
Serial.println(F("Enabling GPS..."));
if (!fona.enableGPS(true))
Serial.println(F("GPS OK..."));
gpson = true;
}
while(!gpson){
delay(1000);
fona.enableGPRS(false);
Serial.println(F("Enabling GPRS"));
if (!fona.enableGPRS(true))
Serial.println(F("Failed to turn GPRS on"));
else
gprson = true;
}
}
void loop() {
delay(4000);
if(!gprson){
fona.enableGPRS(false);
Serial.println(F("Enabling GPRS"));
if (!fona.enableGPRS(true))
Serial.println(F("Failed to turn GPRS on"));
else
gprson = true;
}
float latitude, longitude;
boolean gps_success = fona.getGPS(&latitude, &longitude);
if (gps_success)
{
Serial.print("GPS lat:");
Serial.println(latitude, 6);
Serial.print("GPS long:");
Serial.println(longitude, 6);
uint16_t statuscode;
int16_t length;
char url[100]="http://ivardi.com/gps/report.php?latitude=";
char lati[10];
dtostrf(latitude,1,6,lati);
Serial.println(lati);
char longi[10];
dtostrf(longitude,1,6,longi);
strcat(url, lati);
strcat(url, "&");
strcat(url, "longitude=");
strcat(url, longi);
flushSerial();
Serial.println(url);
if (!fona.HTTP_GET_start(url,&statuscode, (uint16_t *)&length))
{
Serial.println("Failed!");
}
while (length > 0)
{
while (fona.available())
{
char c = fona.read();
#if defined(__AVR_ATmega328P__) || defined(__AVR_ATmega168__)
loop_until_bit_is_set(UCSR0A, UDRE0); // Wait until data register empty.
UDR0 = c;
#else
Serial.write(c);
#endif
length--;
if (! length) {};
}
}
fona.HTTP_POST_end();
}
else
{
Serial.println("Waiting for GPS fix...");
}
}
רכיב ה SIM808 מתקשר עם הארדואינו בממשק סיריאלי – UART – וע"י פקודות AT. היצרן של הרכיב מספק קובץ מפורט איזה פקודות AT מפעילות את האופציות השונות , לדוגמה פקודות לשליחת SMS , להוצאת שיחה וכו'.
אנו נעשה שימוש בסיפריה Adafruit_FONA שמפשטת וחושפת פונקציות פשוטות ופקודות הAT נעשות כבר בתוך הסיפרייה.
כמו כן נעשה שימוש בסיפריה – SoftwareSerial על מנת שנוכל לדבג את התוכנית בערוץ UART החומרתי.
בנוסף בסיפריה ישנו קובץ בשם Adafruit_fona.cpp שם נצטרך לשנות את שם הAPN לאחד שיתאים למפעיל הסלולארי שעם הסים שלו אנו משתמשים.
וכמובן בקוד עצמו יש לשנות את שם השרת אליו נדווח מ yourserver.com לשם של השרת שלכם.
החבילה מבצעת
"GET" request
לשרת עם הפרמטרים של – latitude ו longitude , הקובץ בשרת בשם report.php מקבל את הבקשה ויוצר קובץ JSON עם הערכים הללו.
דף HTML עם מפה של גוגל מוטמעת בו פונה בAJAX כל כמה שניות לשרת בבקשה לספק לו את קובץ ה JSON שהשרת יצר,ואחרי שהוא מקבל את הקובץ הוא מציג את המיקום על גבי המפה שלצורך זה יש לקבל מגוגל KEY ולהוסיף אותו בקובץ tracker.html בשורה 15:
בפוסט הזה ארחיב כיצד לתקשר עם ארדואינו ב WIFI באמצעות ה TL-WR703N .
רכיבים:
ארדואינו כלשהו עם מתאם USB כלשהו (זה יכול להיות UNO R3 או פרו מיני עם מתאם מבוסס ftdi או cp2102 או pl2303 וכו') כל ה USB TO TTL הנפוצים נתמכים.
ראוטר TL-WR703N .
קוד מאוד פשוט לצורך בדיקת תקשורת אותו יש להעביר לארדואינו :
void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
}
// the loop routine runs over and over again forever:
void loop() {
String content = "";
char character;
while(Serial.available()) {
character = Serial.read();
content.concat(character);
delay (10);
}
if (content == "miki") {
Serial.print(content);
{
}
הקוד פשוט קורא מהפורט הסיריאלי ובמידה והמחרוזת היא "miki" הוא מדפיס את הקלט לפורט הסיריאלי כך שהקוד יאפשר לנו לבדוק קישוריות דו כיוונית.
אני אחבר ארדואינו אונו R3 לראוטר.
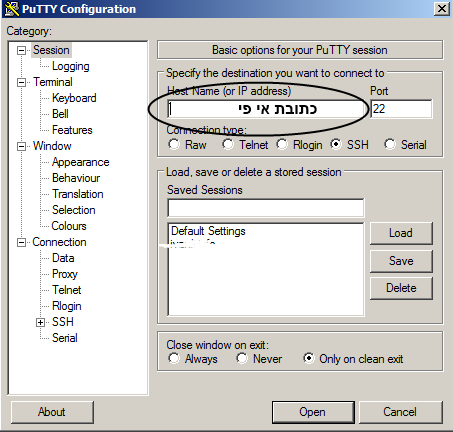
יש להוריד להתקין Putty בשדה הכתובת לשים את כתובת הIP של הראוטר:
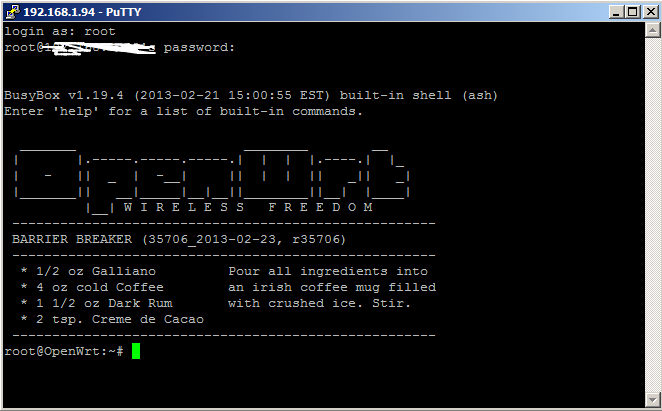
לאחר שנקבל מסך טרמינל בשם המשתמש נקיש root ואת הסיסמה שהגדרנו:
+
לפני שחיברנו את הארדואינו לראוטר דרך USB נריץ את הפקודות הבאות (נעבור לתיקיית dev):
cd /dev
רשימה של כל קבצי המודולים המחוברים למכונת לינוקס :
ls
(רשימה של כל קבצי המודולים המחוברים למכונת לינוקס )
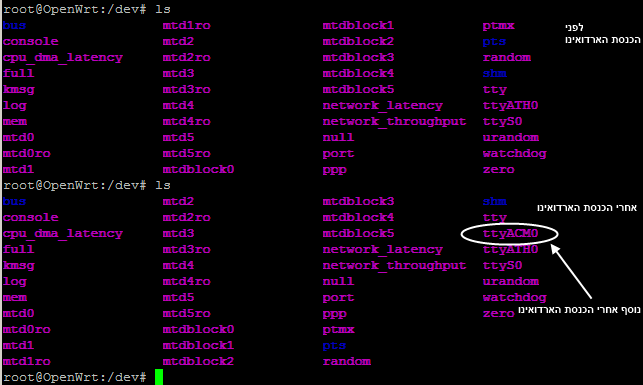
תפתח בפנינו רשימה ונשים לב שאותה פקודת ls אחרי הכנסת הארדואינו תתן רשימה עם מודול אחד נוסף וכך נוכל לדעת את המבואה הסריאלית אליה אנו אמורים להאזין ולשלוח פקודות ע"מ לדבר עם הארדואינו:
נריץ את הפקודה הבאה (יש בעיה של auto reset עם הארדואינו, יש הרבה חומר על הנושא בפורומים שונים זה הסיכום שהגעתי מנבירה בפורומים וחקירה למידע נוסף):
לאחר מכן נריץ את הפקודה (תאזין על פורט ttyACM0 ושזה יהיה ברקע – "&") :
cat /dev/ttyACM0 &
ולאחריה (כתוב לפורט הנ"ל את הקלט "miki" ותתעלם מתו שורה חדשה):
echo -n "miki" > /dev/ttyACM0
נראה שכל פעם שנכתוב את פקודת ה "echo" נקבל את הפלט "miki" כל קלט אחר לא יודפס:
זהו אנחנו יכולים לדבר עם ארדואינו בצורה טורית ניתן ליעל את התהליך עם שפה שכבר מותקנת בראוטר ששמה – Lua כך שיהיה אפשר לגשת לכתובת בדפדפן ולהעביר מסרים לארדואינו (תדליק לד) או לקבל מסרים מהארדואינו (מה הטמפרטורה בחדר) הרחבה על כך בפוסטים הבאים.
את המעגל יצרתי באמצעות תוכנה מאוד שימושית ופופולרית בשם – fritzing שלא ארחיב עליה כאן רק אצרף את הקובץ לצורך הדפסת המעגל.
יש 2 ספריות נפוצות לארדואינו לצורך עבודה עם המודול הזה – rf24 ו mirf.
אני מצאתי את הספרייה rf24 מתאימה יותר לצורך של רשת מודולים אל אף שהיא יותר מורכבת מאשר ספריית ה mirf כמו כן ישנה ספרייה מעולה (אם כי קצת מורכבת) לצורך רשת מודולים שמבוססת על ספריית ה rf24 בשם – rf24network .
אני אדלג על הסבר לספריית rf24 ואקפוץ ישר לעניינים – rf24network.
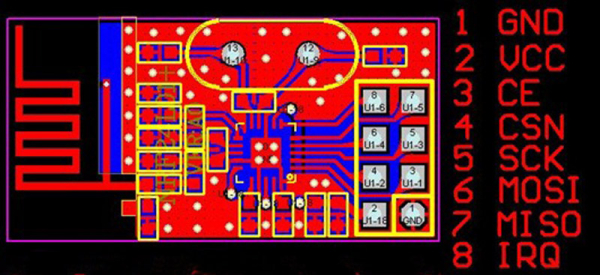
להלן סכימת החיבור בין הארדואינו לבין רכיב ה nrf24l01 :
סכמת חיבור ארדואינו ל NRF24L01
סיגנל
ארדואינו
NRF24L01
GND
GND
1
VCC
3.3V
2
CE
9
3
CSN
10
4
SCK
13
5
MOSI
11
6
MISO
12
7
סכמת חיבור ארדואינו ל NRF24L01
כלומר אם יש בארדואינו פרו 13 יציאות דיגיטליות ו7 יציאות אנלוגיות אחרי חיבור למודול האלחוטי נשארנו עם 8 יציאות דיגיטליות ו7 אנלוגיות.(שזה דיי מספיק למודול אחד – יכולת שליטה על עד 8 אלמנטים וחיבור של עד 7 חיישנים ).
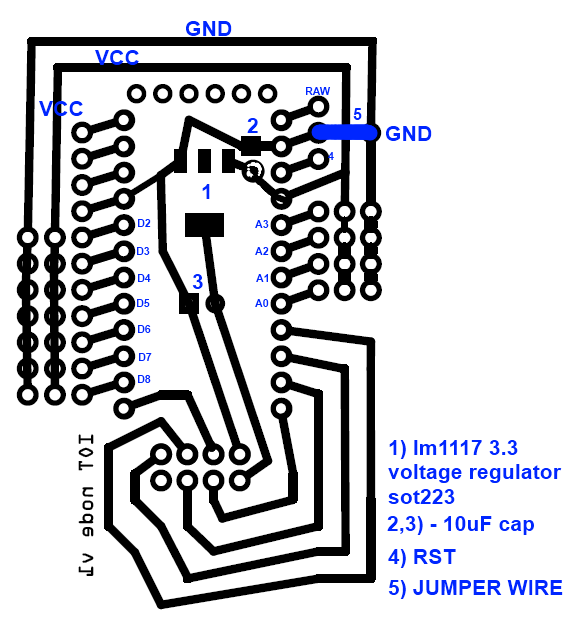
כלומר אני צריך לתכנן מעגל לחיבור מודול האלחוט לארדואינו וחשיפה של 8 פינים דיגיטליים ו 7 אנלוגיים כמו כן עלי להמיר את 5V שמגיע מהארדואינו למודול האלחוט (VCC) מ5V ל 3.3V.
כמו כן עלי לחשוף גם את הפין ה RST לצורך העברת הקוד לארדואינו ואת פין ה RAW לצורך חיבור למקור מתח חיצוני לדוגמה סוללה.
את המעגל יצרתי באמצעות שיטת ה – tuner transfer שלא כאן המקום להרחיב.
השתמשתי בארדואינו פרו 5V ולא ב-3.3V בגלל שההבדל בעלות זה כמעט דולר אך הדבר הצריך ממני להוסיף למעגל ממיר מתח ל3.3 בגלל שזה מה שמקבל מודול ה- nrf24l01 (כמעט 10 ממירי מתח וקבלים עלו לי קצת מעל 2 דולר כך שעדיין יוצא יותר זול).
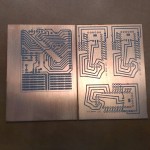
המעגלים (לוח הארדואינו המודפס שבתמונות לא קשור לפרויקט):
הלוחות אחרי הדפסה
הלוחות אחרי הדפסה
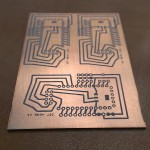
אחרי חומצה
אחרי חומצה
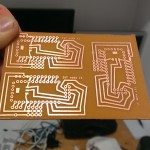
במהלך החומצה
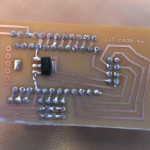
אחרי הלחמה ללא קבלים
הוספת קבלים
node module
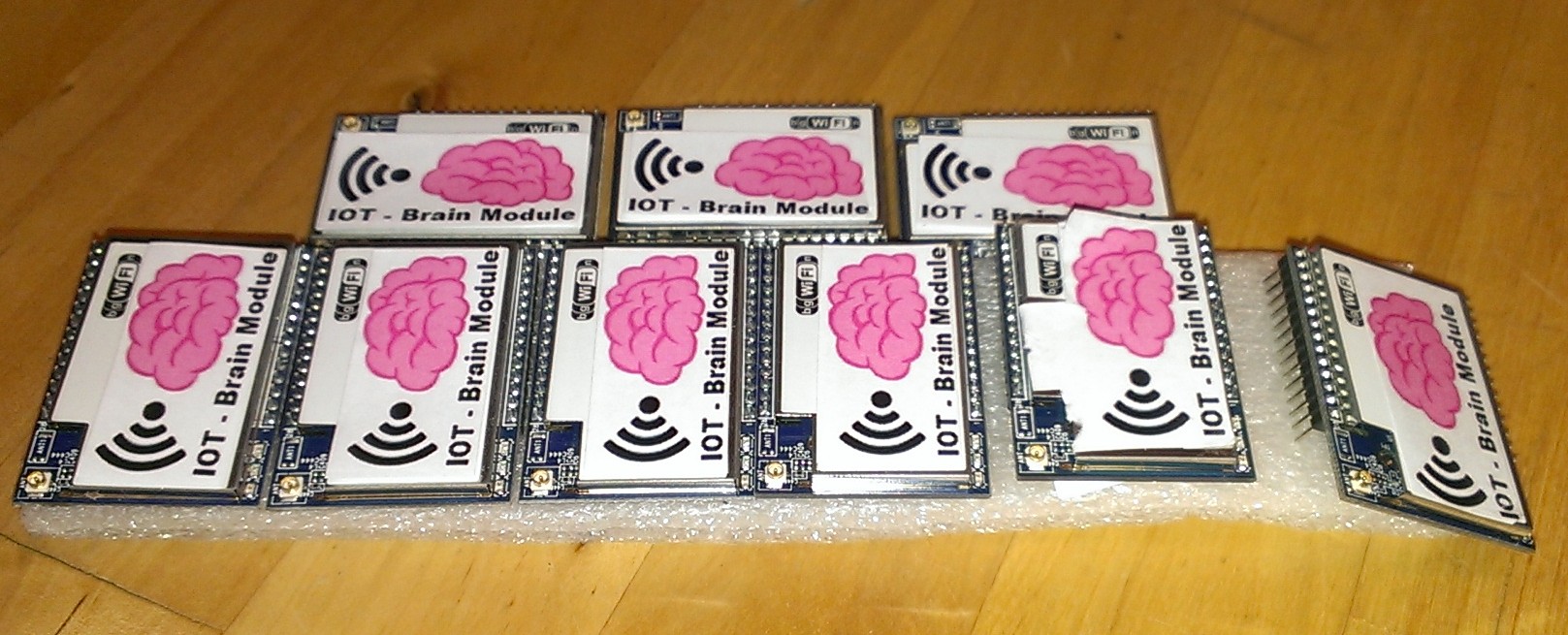
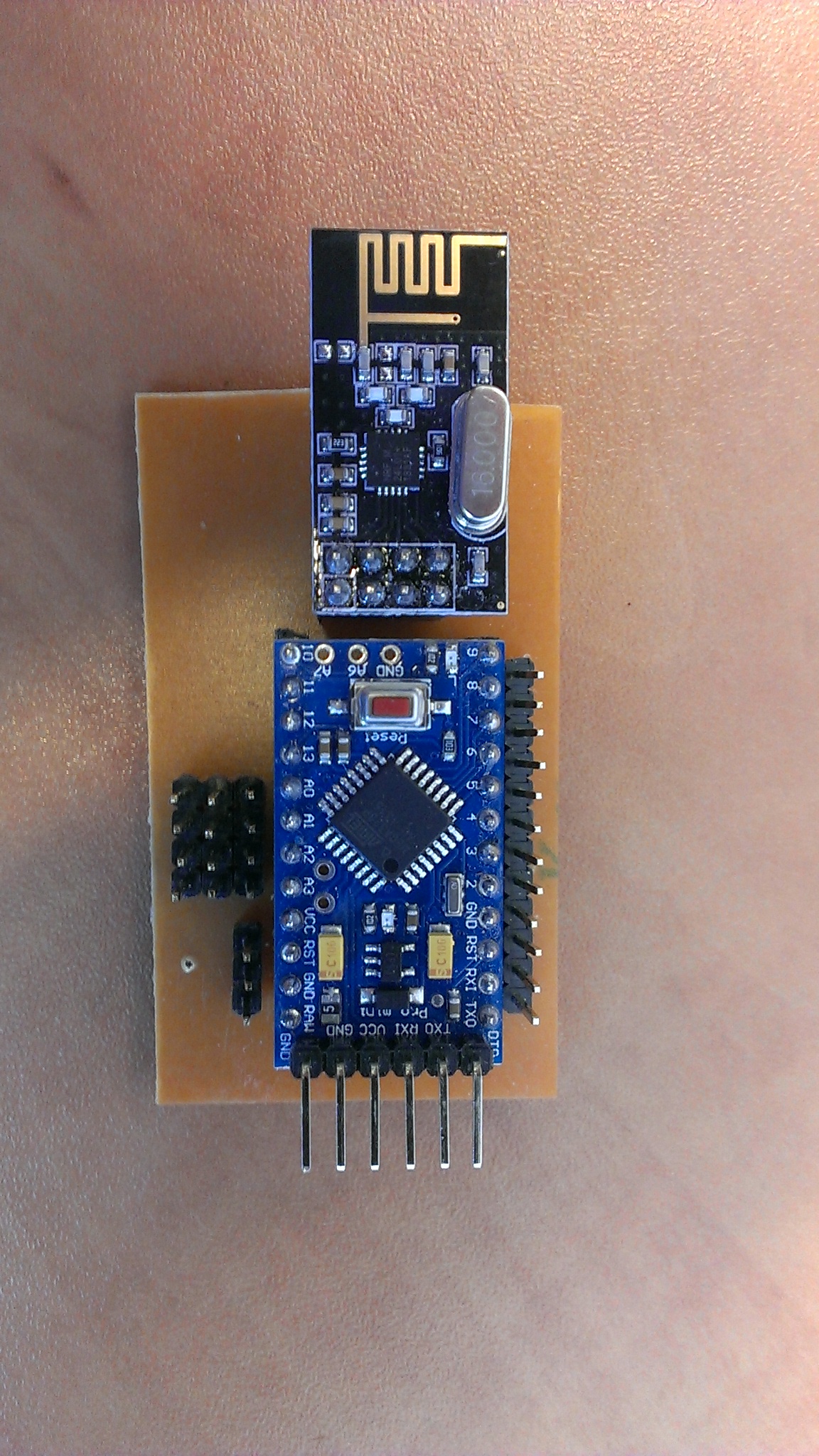
מודולים סופיים לפני העתקת הסקיצה
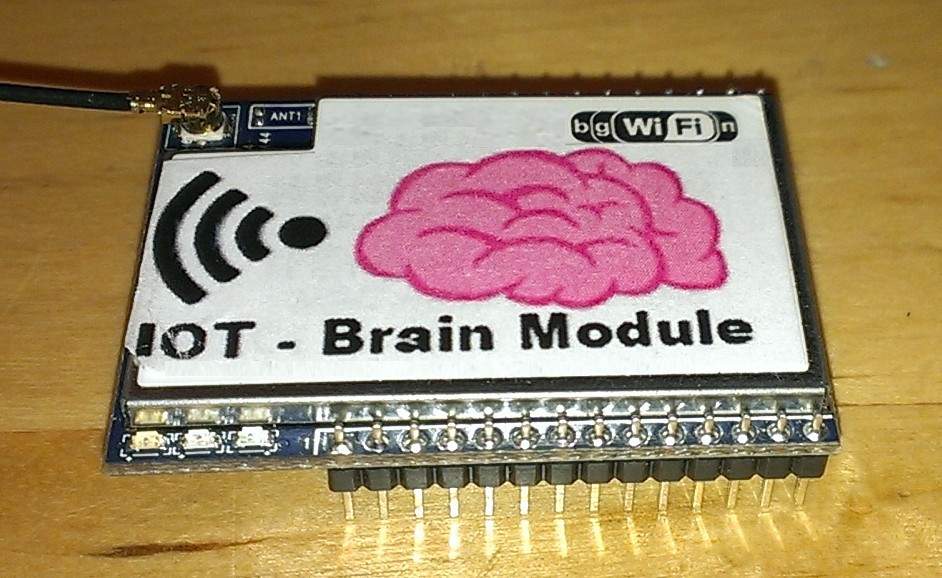
מודול סופי
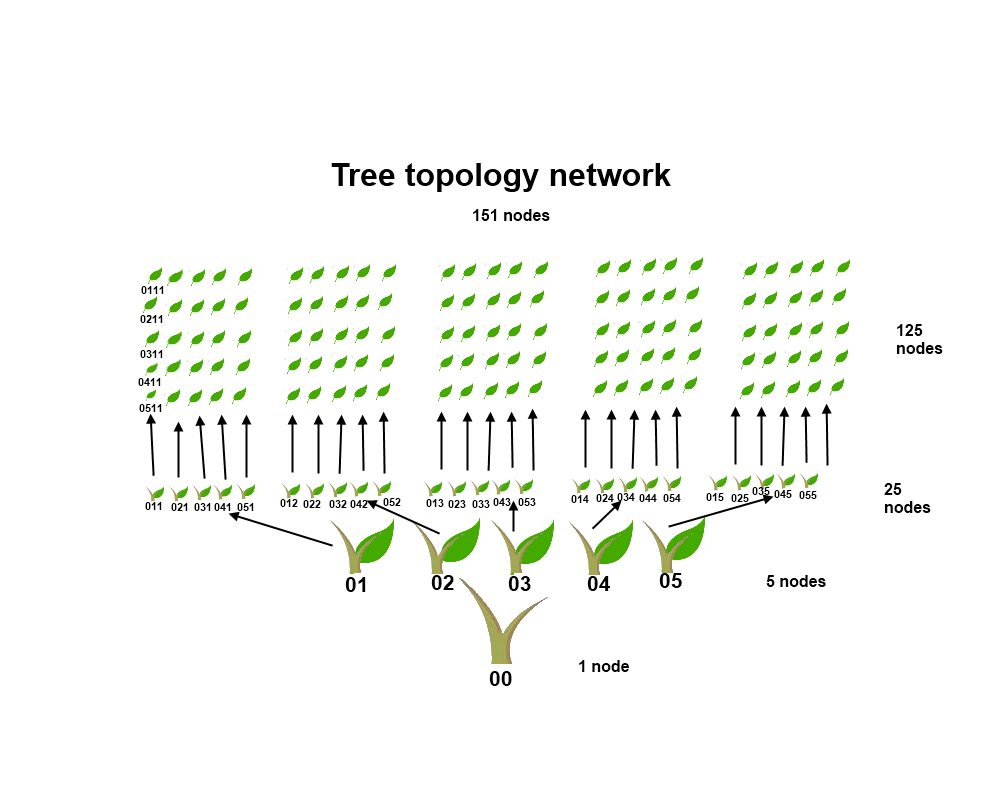
אפרט קצת על מבנה רשת העלים.
היישום הרשת היה קצת שונה מהיישום של מחבר הספרייה rf24network אך עדיין מבוסס על טופולוגית עץ.
ישנו בסיס ראשי בכתובת 00 (כתובות העלים הם בפורמט uint16_t unsigned 16-bit integer) והיות ויש אפשרות ל6 צינורות (PIPES) תקשורת לכל מודול nrf24l01 לפי ה – DATASHEET, אז כל עלה בסיס יכול לתקשר עם 5 בנים (sibling) ועם האבא שלו, הבסיס הראשי היות והוא אב לכולם ואין לו אב משלו יש לו אפשרות להתחבר ל 6 בנים אך כדי לשמור על הקוד פשוט ושכל עלה ראשי יהיה עם אותם המאפיינים אז גם העלה הראשי ביותר יכול לתקשר רק עם 5 בנים.
כל עלה יכול לתקשר עם בסיס האב שלו או עם אחד הבנים שלו אך לא עם אחד מהאחים שלו או עם הסבא או הנכד וכו'…
הקוד שלי הוא עד הרמה השלישית, כלומר 5 בחזקת 3 כלומר 1+25+125+5 עלים = עד 151 נקודות מודולים ברשת ! יכולתי להוסיף עוד 'דור' לרשת ואז היה אפשרות ליותר מפי חמש אך 151 מודולים זה דיי והותר לרשת ביתית.
להלן סכמה של המודולים והכתובות שלהם – נשים לב שהספרות הכי ימניות במספר uint16_t הם בעצם כתובת האב:
בסיס האב הראשי – 00 יהיה בעל קישוריות לאינטרנט (wired / wifi) והוא יהיה אחראי על חשיפת כל רשת החיישנים ומודולי השליטה לרשת האינטרנט.
לבסיס האב הראשי 5 ילדים – 01,02,03,04,05 הוא יכול לתקשר רק איתם והם איתו. האחים לא מדברים בינהם – 01 לא יכול לתקשר עם 02, אלא רק עם האב שלו (00) ועם חמשת ילדיו – 011,021,031,041,051 ,כלומר אם בסיס 00 מעוניין להעביר פקודה לעלה 011 או לקרוא מידע מעלה 011 התעבורה צריכה להיות דרך עלה 01 שהוא האב של 011 והבן של 00 וכן על זה הדרך…
ואם נתרגם למספרים רגילים אז מודול 0 מדבר עם מודולים 1-5 ומודול 1 מדבר עם אביו(0) ועם מודולים 9,17,25,33,41(כפולות של 8).
מודול 2 מדבר עם אביו(0) ועם ילדיו שהם 10,18,26,34,42 (גם כן כפולות של 8) וכן הלאה.
חשבתי בהתחלה לשמור את כתובת העלים ב EEPROM אך לשם הפשטות הכנסתי לכל עלה את הכתובת שלו בתוך קוד המקור (hard coded).
אני מצרף כאן קוד מקור למודול הבסיס וקוד מקור לכל מודולי העלים כרגע הכל זה רישומים ל serial consule אין עדיין חיישנים או relays:
קוד הבסיס:
/*
This program is free software; you can redistribute it and/or
modify it under the terms of the GNU General Public License
version 2 as published by the Free Software Foundation.
*/
/**
* https://iot.org.il
* Internet Of Things Implement by Arduino Pro and nrf24l01
* using RF24Network
*
* Base NODE - main node with eventually internet gateway always with address 00
* By Vardi Michael.
* Adapt from Maniacbug - http://maniacbug.wordpress.com
*/
#include <RF24Network.h>
#include <RF24.h>
#include <SPI>
// nRF24L01(+) radio attached using Getting Started board
RF24 radio(9,10);
// Network uses that radio
RF24Network network(radio);
// Address of our node
const uint16_t this_node = 00;
// Address of the other node
uint16_t other_node;
// Structure of message
char bits[8];
struct a_message//structure of message(need to be less than 32 bytes)
{
uint16_t addressTo; //where the message destination
char digital1To8; // char with take 2 bytes - 8 bits so we can put inside one char 8 digital pins status...
int A1;//sensor number 1
int A2;//sensor number 2
int A3;//sensor number 3
int A4;//sensor number 4
int A5;//sensor number 5
char typeOfMsg;//is it sensor reading or digital command
uint16_t addressFrom;//original origin of the message.
};
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = {0, -1};
int maxIndex = data.length()-1;
for(int i=0; i<=maxIndex && found<=index; i++) { if(data.charAt(i)==separator || i==maxIndex) { found++; strIndex[0] = strIndex[1]+1; strIndex[1] = (i == maxIndex) ? i+1 : i; } } return found>index ? data.substring(strIndex[0], strIndex[1]) : "";
}
void getBits(char c){
for (int i = 7; i >= 0; --i)
{
bits[i]=(c & (1 << i)) ? '1' : '0'; } } void setup(void) { Serial.begin(57600); Serial.println("Base Node Started"); SPI.begin(); radio.begin(); network.begin(/*channel*/ 90, /*node address*/ this_node); } void loop(void) { // Pump the network regularly network.update(); String content = ""; char character; // Is there anything ready for us? while ( network.available() ) { // If so, grab it and print it out RF24NetworkHeader header; a_message message; network.read(header,&message,sizeof(message)); Serial.print(message.addressFrom); Serial.print(";"+message.A1); Serial.print(";"+message.A2); Serial.print(";"+message.A3); Serial.print(";"+message.A4); Serial.print(";"+message.A5); Serial.println(";"+message.typeOfMsg);//+";"+message.A2+";");//+message.A3+";"+message.A4+";"+message.A5+";");//+";"+message.A2+";"+message.A3+";"+message.A4+";"+message.A5+";"+message.typeOfMsg); } while(Serial.available()) { character = Serial.read(); content.concat(character); delay (1); } if (content != "") { if(content !="ack") { a_message message = { getValue(content,';',0).toInt(), getValue(content,';',1).charAt(0),getValue(content,';',2).toInt(),getValue(content,';',3).toInt(),getValue(content,';',4).toInt(),getValue(content,';',5).toInt(),getValue(content,';',6).toInt(), getValue(content,';',7).charAt(0),getValue(content,';',8).toInt()}; if(message.addressTo>5)
{
if(message.addressTo>45)
other_node = message.addressTo % 64;
else
other_node = message.addressTo % 8;
}
else
other_node = message.addressTo;
RF24NetworkHeader header(/*to node*/ other_node);
Serial.print("Sending to node ");
Serial.println(other_node);
bool ok = network.write(header,&message,sizeof(message));
if (ok)
Serial.println("ok");
else
Serial.println("failed");
}
else{
a_message message = { getValue(content,';',0).toInt(),'a',0,0,0,0,0,getValue(content,';',7).charAt(0),getValue(content,';',7).toInt()};
if(message.addressTo>5)
{
if(message.addressTo>45)
other_node = message.addressTo % 64;
else
other_node = message.addressTo % 8;
}
else
other_node = message.addressTo;
RF24NetworkHeader header(/*to node*/ other_node);
Serial.print("Sending to node ");
Serial.println(other_node);
bool ok = network.write(header,&message,sizeof(message));
if (ok)
Serial.println("ok");
else
Serial.println("failed");
}
}
}
להלן קוד המקור של העלים(כאן זה דוגמה לעלה מספר 01 כלומר 1):
/*
This program is free software; you can redistribute it and/or
modify it under the terms of the GNU General Public License
version 2 as published by the Free Software Foundation.
*/
/**
* https://iot.org.il
* Internet Of Things Implement by Arduino Pro and nrf24l01
* using RF24Network
*
* Leaf NODE - Leaf node with hardcoded address.
* By Vardi Michael.
* Adapt from Maniacbug - http://maniacbug.wordpress.com
*/
#include <RF24Network.h>
#include <RF24.h>
#include <SPI>
// nRF24L01(+) radio attached using Getting Started board RF24 radio(9,10); // Network uses that radio RF24Network network(radio); // Address of our node const uint16_t this_node = 021; // Address of the other node const uint16_t base_node =00; uint16_t other_node; boolean is_queue=false; // Structure of message char bits[8]; struct a_message { uint16_t addressTo; char digital1To8; int A1; int A2; int A3; int A4; int A5; char typeOfMsg; uint16_t addressFrom; }; void getBits(char c){ for (int i = 7; i >= 0; --i) { bits[i]=(c & (1 << i)) ? '1' : '0'; } } void setup() { Serial.begin(57600); Serial.print(this_node); Serial.println(" Node Started"); SPI.begin(); radio.begin(); network.begin(/*channel*/ 90, /*node address*/ this_node); } void loop(void) { // Pump the network regularly network.update(); a_message message; // Is there anything ready for us? while ( network.available() ) { // If so, grab it and print it out delay(200); RF24NetworkHeader header; network.peek(header); network.read(header,&message,sizeof(message)); is_queue=true; } network.update(); if(is_queue) { if(message.addressTo==this_node&&message.addressFrom==base_node) { Serial.print("Received packet from "); Serial.print(message.addressFrom); Serial.print(";"); Serial.print(message.digital1To8); Serial.print(";"); Serial.print(message.A1); Serial.print(";"); Serial.print(message.A2); Serial.print(";"); Serial.print(message.A3); Serial.print(";"); Serial.print(message.A4); Serial.print(";"); Serial.print(message.A5); Serial.print(";"); Serial.print(message.typeOfMsg+";"); Serial.println(message.addressTo); } else { if(message.addressTo>45) { int tmpAddress; tmpAddress = message.addressTo / 64; other_node=tmpAddress*64+this_node%64; } else{ int tmpAddress; tmpAddress = message.addressTo / 8; other_node=tmpAddress*8+this_node%8; } RF24NetworkHeader header2(/*to node*/ other_node); a_message nextMsg = message; Serial.print("Sending to node "); Serial.println(other_node); bool ok = network.write(header2,&nextMsg,sizeof(nextMsg)); if (ok) Serial.println("ok"); else Serial.println("failed"); } is_queue=false; } }
לצורך ניסוי ניקח 3 מודולים.
מודול ראשון יהיה מודול הבסיס ונעביר אליו את הסקיצה של קוד הבסיס.
מודול שני יהיה עלה שהוא בן ל 00 עם הכתובת 01.(יש לשנות את הכתובת של המודול בקוד מקור המצורף ל 01 במקום 021).
מודול שלישי הוא בן ל מודול שני 01 הוא יהיה 021 שזה המספר 17.
נפתח 3 מופעים של ה ARDUINO IDE לכל מודול נזהה באיזה פורט הוא מאזין (כמובן שיש לחבר לPRO MINI כבל תקשורת ע"מ שיוכל לתקשר טורית דרך ה USB עם המחשב וזה לא יכוסה פה) ונפתח בכל מופע את הSERIAL MONITOR ונאזין על הפורט הרלוונטי.
נקבל במודול הבסיס את ההודעה הבאה:
Base Node Started
ובמודולי העלה נקבל :
17 Node Started
או
1 Node Started
בהתאמה.
במוניטור הסיריאלי של נקודת הבסיס נזין את השדר הבא:
17;a;2;2;2;2;2;s;00
השדר:
17 – כתובת היעד
a – תו שמורכב משני בייטים כלומר 8 סיביות שיכולות לייצג מצב של 8 יציאות דיגיטליות וכך לבזבז פחות מקום בשדר.
2 – איזשהו קריאה של חיישן לדגמה
s – הודעה שהשדר הוא מסוג קריאת חיישן ולא פקודה כשלהיא ליציאה דיגיטלית
00 – כתובת מקור השדר.
ונראה שבעלה 01 התקבל השדר אך היות וזה לא מיועד אליו אלא הוא משמש כאן רק כ"תיבת ממסר" הוא מעביר את המסר לעלה המתאים שזה 021(17).
היות וטווח השידור והקליטה של nrf24l01 מוגבלים היכולת לשרשר מודולים מאפשרת להרחיב את טווח השידור והקליטה של הרשת ולהתגבר על המגבלה הזאת.
רעיון "האינטרנט של דברים" מאוד מרתק – להפוך את הכל (!) לזמין ברשת .
האפשרות שכל הדברים הסובבים אותנו יהיו זמינים ברשת ופריסת חיישנים שונים סביבנו שגם הם זמינים לרשת זה בעצם רוב הדרך לכוון של "בית חכם".
מה צריך כדי ליצור את "האינטרנט של הדברים" הפרטי שלי ובנוסף "להחכים" את הבית שלי ? מה העלות והמורכבות של הדברים?
הייתי רוצה פתרון קטן , זול וקל ליישום.
אני חקרתי במשך הזמן על האופציות הזמינות לפתרון שכולל את כל הפרמטרים שמניתי. בפוסט הזה ובסדרת הפוסטים שיבואו אכתוב על הנושא מתוך ניסיון שלי.
יש לי ניסיון בפיתוח לארדואינו שזה בעצם מיקרו בקר מאוד פופולרי שניתן לתכנות בצורה יחסית פשוטה בסביבת פיתוח זמינה להורדה ובקוד פתוח.
כלומר באמצעות הארדואינו ניתן לשלוט בכל דבר ואם נחבר אליו חיישנים מסוגים שונים נוכל גם "לחוש את הסביבה". דיי מוקדם התברר שזאת תהיה הפלטפורמה עליה אתבסס כפתרון למודול שיתחבר לכל דבר אותו נרצה ברשת או כמודול שיקשר בין הרשת לסוגים שונים של חיישנים.
אך כמיקרו בקר בלבד חסרה החוליה שתקשר בינו לבין מודולים אחרים ובניהם לרשת האינטרנט לכן חיפשתי פתרון פשוט ליישום והכי חשוב כמה שיותר זול בהנחה שככל שמודול כזה(אקרא לו מעכשיו NODE או עלה) יהיה זול יותר אחבר אותו ליותר דברים וכך להפוך כמה שיותר דברים לחכמים וזמינים ברשת.
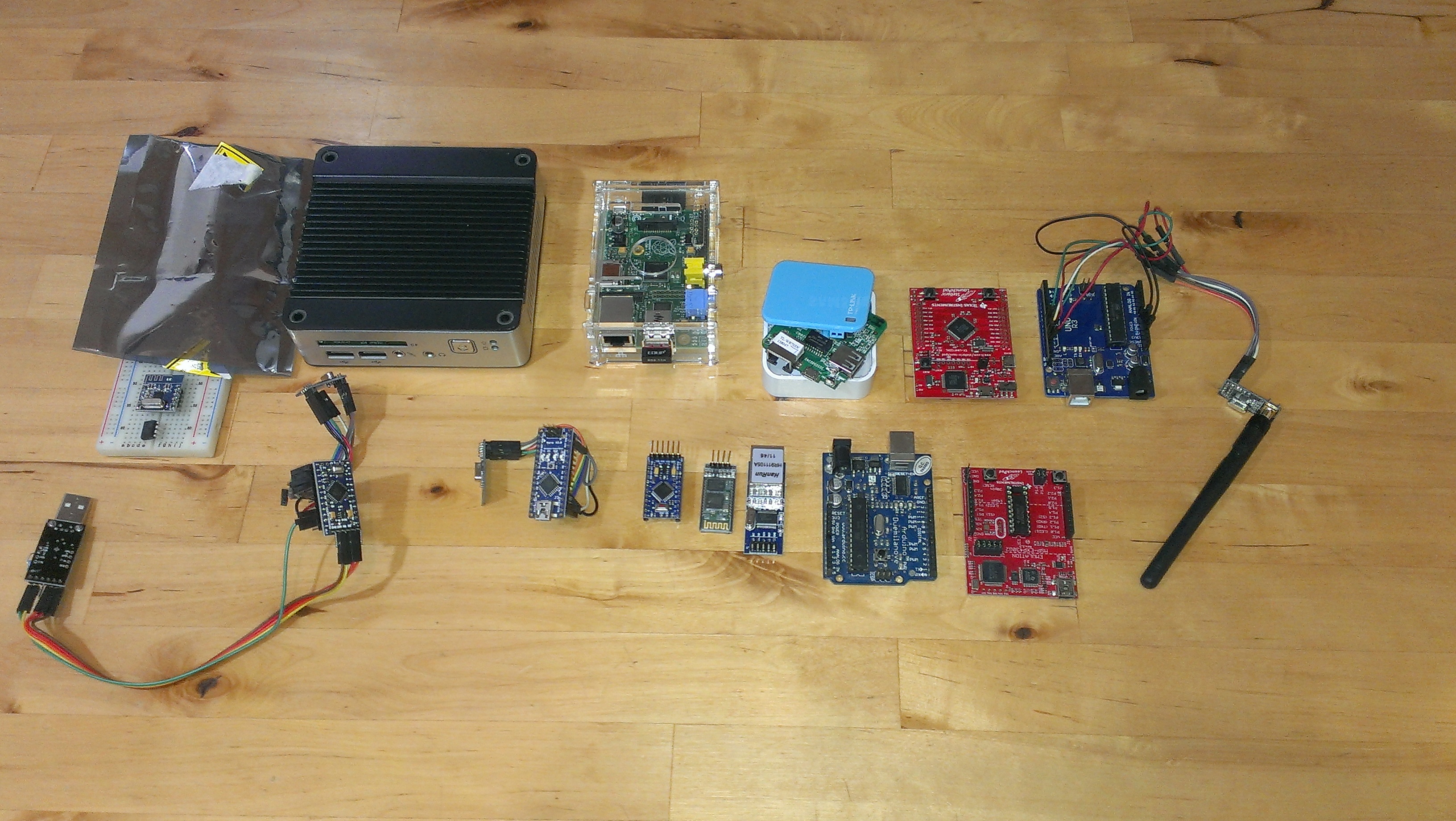
התצורות היותר פופולריות היום של ארדואינו:
ישנם הרבה מודולים עם אפשרויות תקשורת בהם שקלתי להשתמש :
מיני מחשב X86 עם מערכת הפעלה XP/linux .
Raspberry PI.
ראוטר נייד או כל ראוטר שאפשר להתקין עליו קושחה כמו OPENWRT.
כרטיסי הרחבה של ארדואינו לרשת .
Bluetooth.
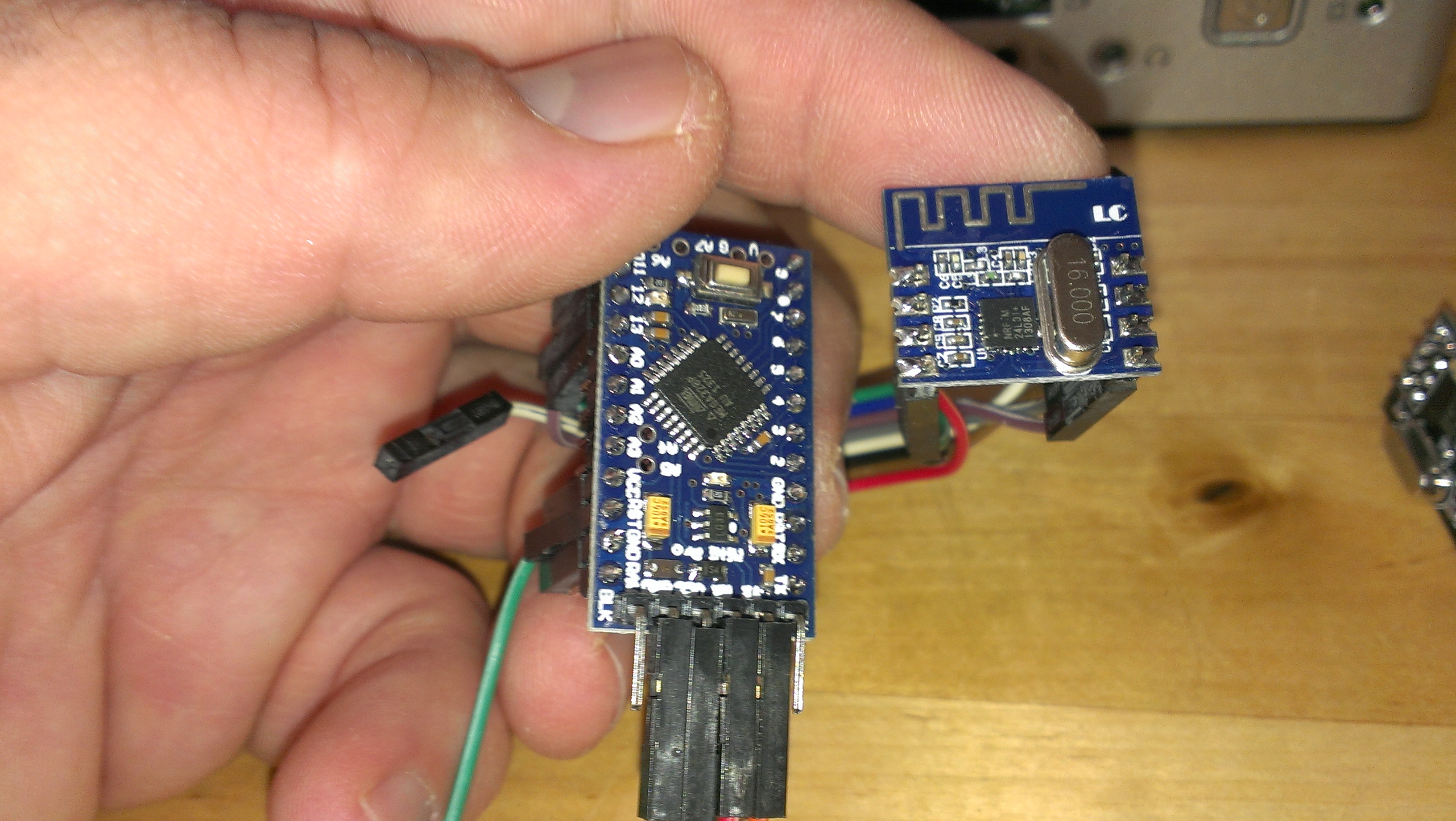
לא ארחיב כאן על ההתנסות שלי עם כל פתרון אפשרי אלא רק אקצר ואומר שהדרך הכי זולה ויחסית פשוטה עם דגש על צריכת חשמל נמוכה וגודל של מודול היא לחבר ארדואינו פרו מיני עם מודול תקשורת נפוץ וזול – nrf24l01.
+nRF24L01 הוא שבב בעל צריכת חשמל נמוכה שמשדר בצורה אלחוטית בתדר 2.4GHz מחברת Nordic Semiconductor הוא משתמש בפרוטוקול SPI, ויש לו טווח תיאורי של כ -50 מטר פחות או יותר, תלוי אם הסביבה בין המשדרים נקייה ממכשולים/קירות ורוחב הפס הוא מספיק לצורך שידור נתוני חיישן וכו'.
כמובן שהעלה הראשי במערכת (base node) יכלול גם רכיב שיאפשר קישוריות לרשת כמו WIFI.
היום חיקוי של ארדואינו מיני פרו 5V ניתן לרכישה בEBAY בפחות מ-3$ והרכיב תקשורת כ- 1.2$ – בעצם מודול שישמש כבסיס ל- NODE ב 4$ כולל משלוח(!) אני לא חושב שכרגע ניתן לנצח את המחיר הזה(אפילו קניה רק של הצ'יפ עצמו – ATMEGA328P-PU בלבד יותר יקרה מהחיקוי לפרו) .
לצורך פיתוח השתמשתי בלוחות הארדואינו היותר נפוצים שיש להם גם יכולת התחברות בUSB למחשב.
המודול הסופי יהיה כמובן מבוסס על ארדואינו ערום יותר כמו הפרו.
פרויקט זרוע רובוטית יכול להיות דבר מעולה שניתן ללמוד ממנו רבות והתוצר הסופי שימושי ונחמד, לבנות זרוע רובוטית מאפס יכול להיות משימה לא פשוטה ולקנות ערכה מוכנה בד"כ יעלה מאוד יקר.
לפני זמן מה מצאתי שקיימת זרוע צעצוע מאוד זולה וזמינה ברשת של חברה בשם – OWI.
זוהי זרוע מאוד פשוטה ללא כל בקר עם 5 מנועי DC פשוטים ושלט חוטי ללא כל אמצעי בקרה על מיקום כל מפרק של הזרוע.
היה לי מכר שביקר בארצות הברית לכן כל הזרוע עלתה לי 29$ כולל משלוח.
למי שאין מכר בחו"ל הזרועה כולל משלוח זמינה ב EBAY באזור ה 350 שקל כולל משלוח, ישנם כמה חנויות אינטרנטיות שמוכרות את הזרוע בארץ אך המחיר משמעותית יקר יותר.
המטרה – לחבר את המנועים של הזרוע לבקר ארדואינו, להוסיף דרך לקרוא את המיקום של כל מפרק ,להוסיף מצלמה ולתת לכל זה ממשק אינטרנטי.
רכיבים לפרויקט:
ערכת זרוע .
לוח ארדואינו (אני השתמשתי ב dumiliannov כי זה מה שהיה לי זמין).
לוח הרחבה(מגן) (ציוד הקפי משלים לארדואינו) בקר מנועים של adafruit (קיימים העתקים לא מקוריים בחניות סיניות בעלות נמוכה יותר שם אני קניתי).
בקר זוג מנועים רגיל כמו זה (היה לי בקר כזה שאחת היציאות שלו תקולה ולכן הוא יכול לשלוט רק על מנוע אחד אך זה הספיק – הסבר בהמשך ).
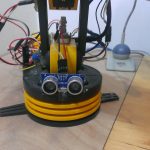
כל פוטנציומטר מחובר לפין אנלוגי שעל גבי הלוח הרחבה:
בנוסף ישנה מצלמה שפרקתי ממחשב נייד וחיברתי לה מחבר USB והיא ממוקמת ע"ג החלק העליון.
הארדואינו והמצלמה מחוברים למחשב המריץ וינדוס XP ע"ג מחשב קטן שמחובר לחלק התחתון של השולחן ושמשמש כשרת.
על המחשב הזה יש 2 תוכנות שרצות כ- service :
1. YAWCAM – תוכנה לשידור תזרים של פריימים ממצלמת הרשת שמחוברת למחשב .
2. node.js יחד עם socket.ioexpress ו- serial . כל הקונפיגורציה הזאת כדי שיהיה ניתן לשלוט על הראדואינו בזמן אמת דרך אפליקציית javascript.
ישנם סליידרים לכל מפרק שמזיזים את הזרוע בהתאם לקריאה מהפוטנציומטרים ובנוסף ישנם כפתורים לכל מפרק שמזיזים את הזרוע ללא קשר לקריאה מהפוטנציומטרים.
ישנה גם אפשרות לשלוח לארדואינו מסר ב SERIAL וכפתור לקריאת החיישן האולטרסוני ולשליטה על נורת הלד.
מתחת לסטרים של המצלמה ישנו אלמנט של serial output terminal שלשם מוזרמת כל תכולת המסרים שמגיעים מהSERIAL של הארדואינו.
כל הקבצים הסטטיים (קבצי JS CSS HTML IMAGES) יושבים על שרת WEB חיצוני והקישור למצלמה ולnodejs נעשה ישירות למחשב שמשמש כשרת כשהפורטים אליו פתוחים בפיירוול הביתי.
קוד הארדואינו:
//*************************************************************
//OWI Arm controller
//Include potenciometers for position.
//By Vardi Michael
//iot.org.il
//*************************************************************
#include
#include
#define PING_PIN A5 // Arduino pin tied to both trigger and echo pins on the ultrasonic sensor.
#define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(PING_PIN, PING_PIN, MAX_DISTANCE); // NewPing setup of pin and maximum distance.
int tempPing=0;
AF_DCMotor motor1(1); // Instantiate all the motors
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
int LED=2; //pin for LED
int gripperA=9; //pin for gripper close
int gripperB=10; //pin for gripper open
AF_DCMotor motorArray[]={motor1,motor2,motor3,motor4}; //put all motors in an array.
//function to drive all motors take 3 params - motor number,motor speed and motor direction( 1 or 2 to represent forward/backward).
void motorDrive (int motor,int motorSpeed,int motorDirection,int motorDuration)
{
digitalWrite(gripperA, LOW);//turn off gripper motor
digitalWrite(gripperB, LOW);
if(motor-1>3)//motor-1 >3 in the motors array mean its only gripper motor(ordenarry motor controller and not arduino motor shield).
{
if(motorDirection>1) //1 mean forward and >1 mean backwards
digitalWrite(gripperA, HIGH);
else
digitalWrite(gripperB, HIGH);
delay(motorDuration);
digitalWrite(gripperA, LOW);
digitalWrite(gripperB, LOW);
}
else
{
if(motorDirection>1)
{
motorArray[motor-1].setSpeed(motorSpeed); // set the speed up to 255
motorArray[motor-1].run(BACKWARD);
}
else
{
motorArray[motor-1].setSpeed(motorSpeed); // set the speed to 100/255
motorArray[motor-1].run(FORWARD);
}
delay(motorDuration);
motorArray[motor-1].setSpeed(0);
motorArray[motor-1].run(RELEASE);
motorArray[motor-1].setSpeed(0);
}
}
//function to drive all motors to potentiometer position reading value;
int motorDrivePosition (int posit,int motor)
{
digitalWrite(gripperA, LOW);//turn off gripper motor
digitalWrite(gripperB, LOW);
int tempPositionVal = analogRead(motor-1);
int delta=tempPositionVal-posit;
while(abs(delta)>40)
{
if((motor-1)>3)//motor-1 >3 in the motors array mean its only gripper motor(ordenarry motor controller and not arduino motor shield).
{
if(tempPositionVal<posit) //1 mean forward and >1 mean backwards
{
digitalWrite(gripperA, HIGH);
delay(10);
digitalWrite(gripperA, LOW);
}
else if(tempPositionVal>posit)
{
digitalWrite(gripperB, HIGH);
delay(10);
digitalWrite(gripperB, LOW);
}
}
else if(motor==1)
{
if(tempPositionVal>posit)
{
motorArray[motor-1].setSpeed(255); // set the speed up to 255
motorArray[motor-1].run(BACKWARD);
delay(10);
motorArray[motor-1].setSpeed(0);
motorArray[motor-1].run(RELEASE);
motorArray[motor-1].setSpeed(0);
}
else if(tempPositionVal<posit) { motorArray[motor-1].setSpeed(255); // set the speed to 100/255 motorArray[motor-1].run(FORWARD); delay(10); motorArray[motor-1].setSpeed(0); motorArray[motor-1].run(RELEASE); motorArray[motor-1].setSpeed(0); } } else if(motor>1&&motor<5)
{
if(tempPositionVal<posit) { motorArray[motor-1].setSpeed(255); // set the speed up to 255 motorArray[motor-1].run(BACKWARD); delay(10); motorArray[motor-1].setSpeed(0); motorArray[motor-1].run(RELEASE); motorArray[motor-1].setSpeed(0); } else if(tempPositionVal>posit)
{
motorArray[motor-1].setSpeed(255); // set the speed to 100/255
motorArray[motor-1].run(FORWARD);
delay(10);
motorArray[motor-1].setSpeed(0);
motorArray[motor-1].run(RELEASE);
motorArray[motor-1].setSpeed(0);
}
}
tempPositionVal = analogRead(motor-1);
delta=tempPositionVal-posit;
}
Serial.println(tempPositionVal);
if(motor-1>3)
{
digitalWrite(gripperA, LOW);
digitalWrite(gripperB, LOW);
}
else
{
motorArray[motor-1].setSpeed(0);
motorArray[motor-1].run(RELEASE);
motorArray[motor-1].setSpeed(0);
}
}
//function to "expload" string from serial with delimiting and return desired value
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = {0, -1};
int maxIndex = data.length()-1;
for(int i=0; i<=maxIndex && found<=index; i++) { if(data.charAt(i)==separator || i==maxIndex) { found++; strIndex[0] = strIndex[1]+1; strIndex[1] = (i == maxIndex) ? i+1 : i; } } return found>index ? data.substring(strIndex[0], strIndex[1]) : "";
}
void setup()
{
Serial.begin(9600); // set up Serial library at 9600 bps
motor1.setSpeed(100); // set the speed to 100/255
motor2.setSpeed(100); // do the same for the others...
motor3.setSpeed(100);
motor4.setSpeed(100);
//Setup gripper
pinMode(gripperA, OUTPUT); //Initiates Motor gripper Channel A pin
pinMode(gripperB, OUTPUT); //Initiates Motor gripper Channel B pin
pinMode(LED, OUTPUT); //Initiates lED pin
}
void loop()
{
//handel the serial communication...reading a string from serial
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
if(abs(tempPing-(uS / US_ROUNDTRIP_CM))>5)
{
Serial.print("ping;");
Serial.println(uS / US_ROUNDTRIP_CM); // Convert ping time to distance and print result (0 = outside set distance range, no ping echo)
}
tempPing=uS / US_ROUNDTRIP_CM;
String content = "";
char character;
while(Serial.available())
{
character = Serial.read();
content.concat(character);
delay (1);
}
if (content != "")
{
if(content =="ping")
{
Serial.print("ping;");
Serial.println(uS / US_ROUNDTRIP_CM); // Convert ping time to distance and print result (0 = outside set distance range, no ping echo)
}
else if(content =="ledon")
{
digitalWrite(LED, HIGH);
}
else if(content =="ledoff")
{
digitalWrite(LED, LOW);
}
else if(getValue(content,';',0) =="cp")//get current motors position report
{
int valtemp = analogRead(getValue(content,';',1).toInt()-1) ; // read the input pin 0
Serial.println(valtemp); // report the new readings
delay(10);
}
else if(getValue(content,';',0) =="pos")//drive motor to position of potentiometer
{
motorDrivePosition(getValue(content,';',1).toInt(),getValue(content,';',2).toInt());
}
else//call for motorDrive function according to string from serial
motorDrive(getValue(content,';',0).toInt(),getValue(content,';',1).toInt(),getValue(content,';',2).toInt(),getValue(content,';',3).toInt());
}
}